Two Types of Value-Based Methods
- Value-Based Methods에서는 state가 주어졌을 때 어떤 state로부터 expected value를 학습한다.
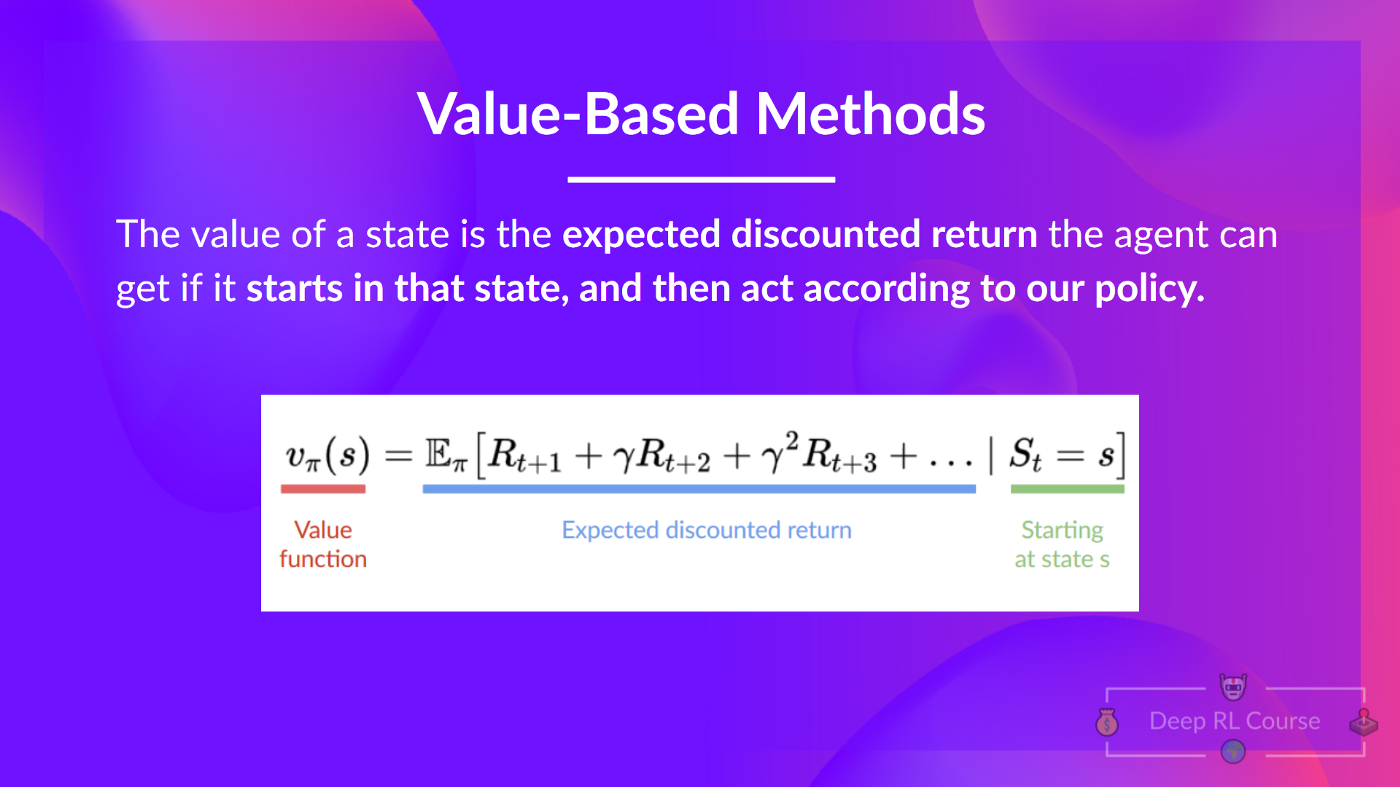
- 어떤 state의 value는 그 state로부터 시작해서 주어진 policy를 따랐을 때 agent가 받을
expected discounted return이다.
💡
하지만 Value-Based Methods에서는 Policy는 학습하지 않는데 무슨 Policy를 따른 다는거죠?
- 우리는 앞서 Optimal Policy를 찾기 위해 두 가지 방법이 있다고 배웠다.
Policy-Based Methods:
1. Policy를 직접 학습하고 2. State가 주어졌을 때 어떤 Action 을 취해야할지 바로 학습 3. Value-Function이 없다.
Value-Based Methods
- Value-Based Method에서는 Policy를 직접 학습 하지 않고,
state혹은state-actionpair가 주어졌을 때 어떤 value를 가질지 학습한다. value가 주어졌을 때 해당 value를 통해 다음에 취할 Action을 결정한다.
- Policy를 학습하지 않기 때문에 어떻게 동작해야 하는지 우리가 직접 정해줘야한다.
- Value-Based Method에서는 Policy를 직접 학습 하지 않고,
- 결론적으로 위 두 가지 방법 중 어느 방법으로 학습 하더라도 우리는 항상 Policy를 갖는다. 단지 Value-Based Methods 인 경우에 그 Policy는 우리가 미리 정한(pre-specified) 함수이다.
- 둘의 차이점을 아래와 같다.
- In Policy-Based: optimal policy 는 학습을 통해 직접 구한다.
- In Value-Based: 와 같은 optimal Value function을 찾음으로 자연스럽게 이를 통해 policy도 optimal 해진다.

- 사실 대부분의 경우, Value-Based Methods에서는 Exploration/Exploitation trade-off를 다루는
Epsilon-Greedy Policy를 사용한다.
- 앞서 언급하였던 바와 같이 Value-Based Methods는 두 가지 종류가 있다.
The State-Value Function
- Value Function under a policy 를 아래와 같이 쓴다.

각 스텝에 대하여, state-value function은 앞으로 모든 스텝에 대하여 주어진 policy 를 따르고 agent가 현재 state부터 시작했을 때의 expected return을 output을 갖는다. 
각 state마다 value값이 위 maze처럼 주어졌을 때 policy에 따라 움직이면 RRRRDDRR와 같은 순서로 움직이게 된다. (Greedy Policy)
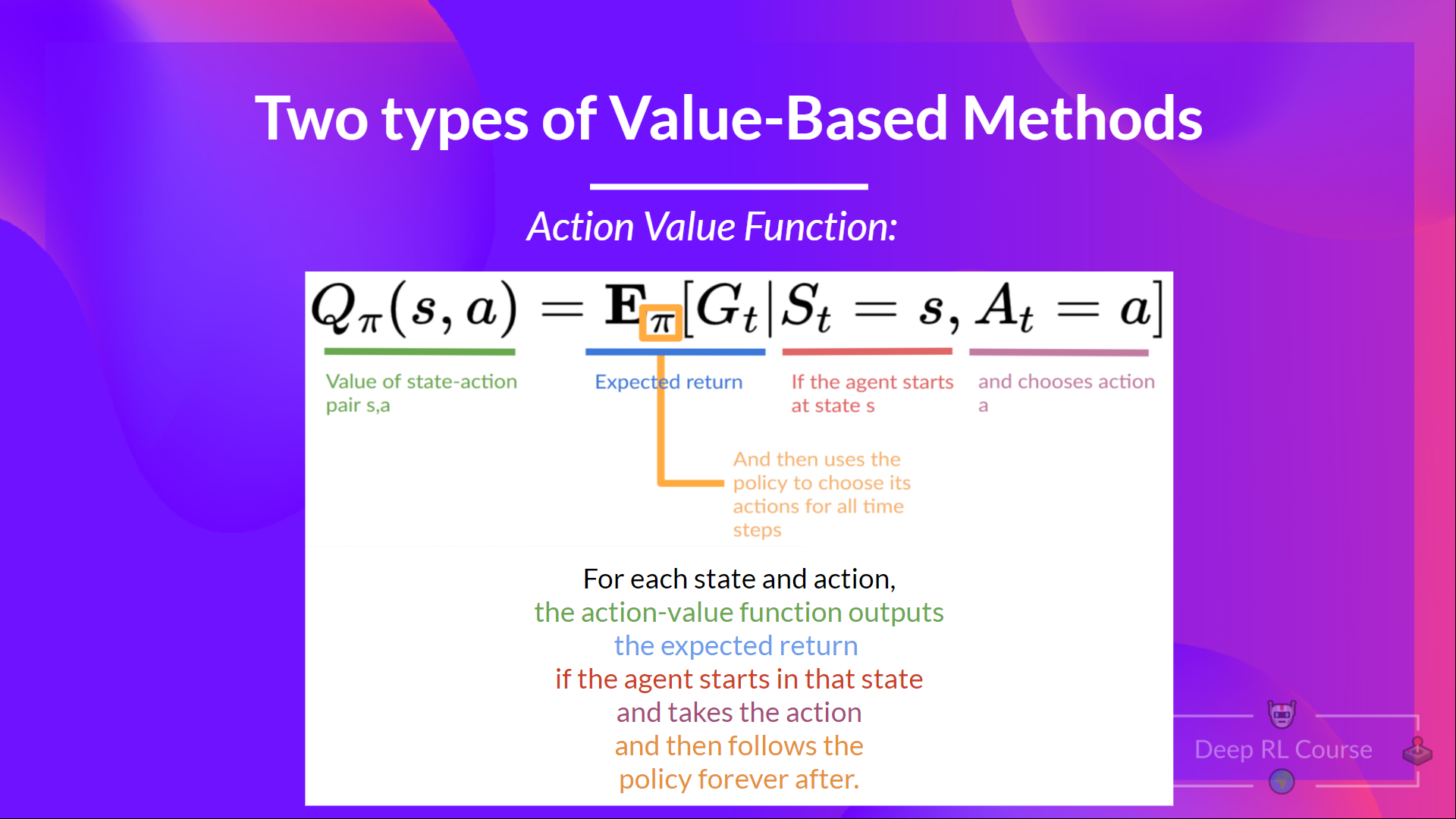
The Action-Value Function
- Action-Value Function에서는 매 step-action pair 마다 agent가 현재 state에서 시작하고 action을 취하고, 주어진 policy 를 앞으로 따랐을 때의 expected return을 output으로 갖는다.

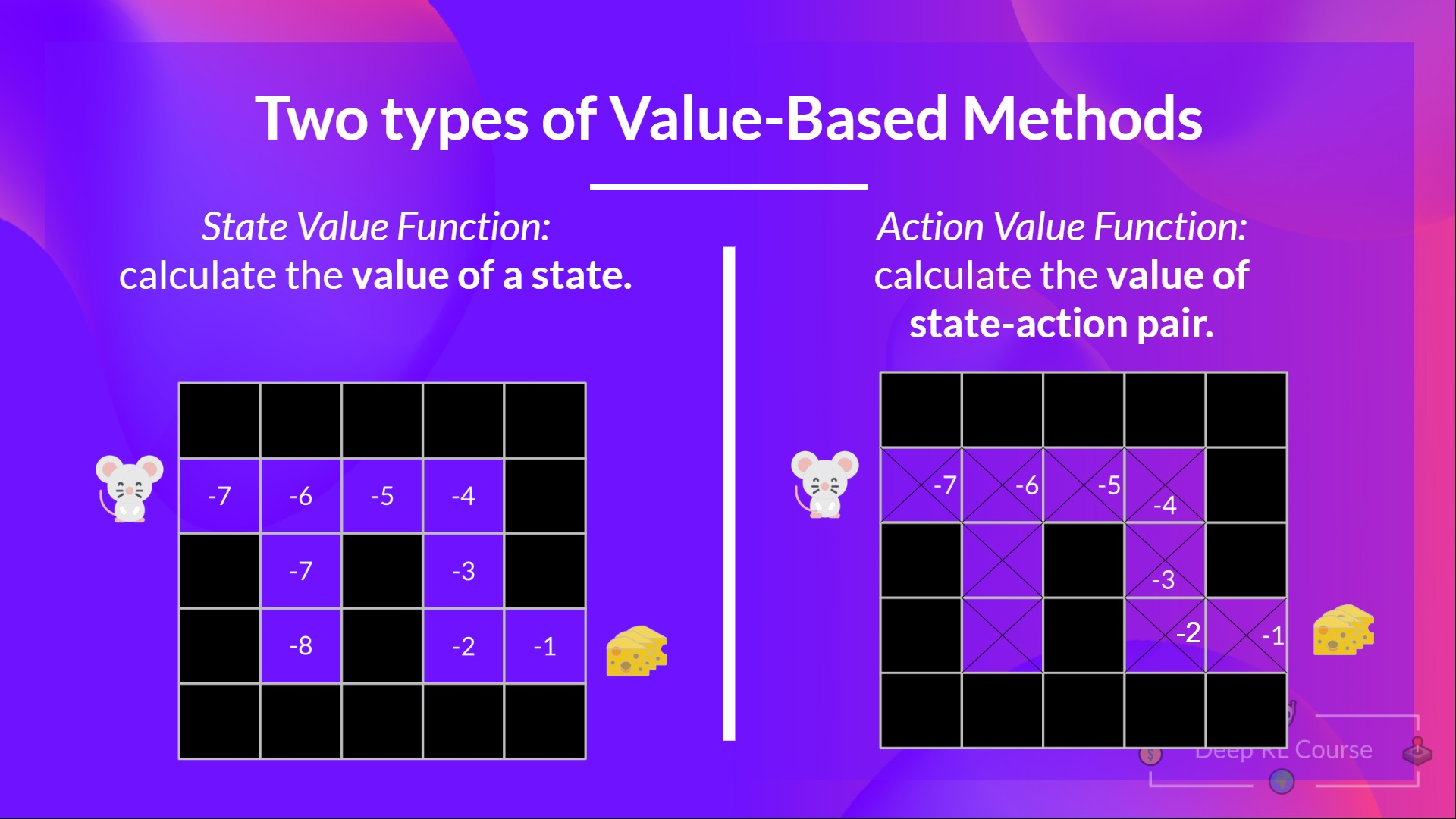
- 두 Methods의 차이점을 다음과 같다.
- state-value function은 state 에 대해서만 expected return을 계산한다.
- action-value function은 state-action pair () 에 대하여 expected return을 계산한다. 따라서 이는 주어진 state 에서 action 를 취했을 때의 value를 의미한다.
💡
하지만 여기서 각각의 value를 계산하는 것은 computationally expensive하다. 왜냐하면 주어진 state 부터 agent가 얻을 수 있는 모든 return값을 구하여 계산해야하기 때문이다.
여기서
Bellman equation이 등장한다.- Bellman Equation은 우리의 state, action value function의 계산을 더욱 간단히 한다.
Bellman Equation
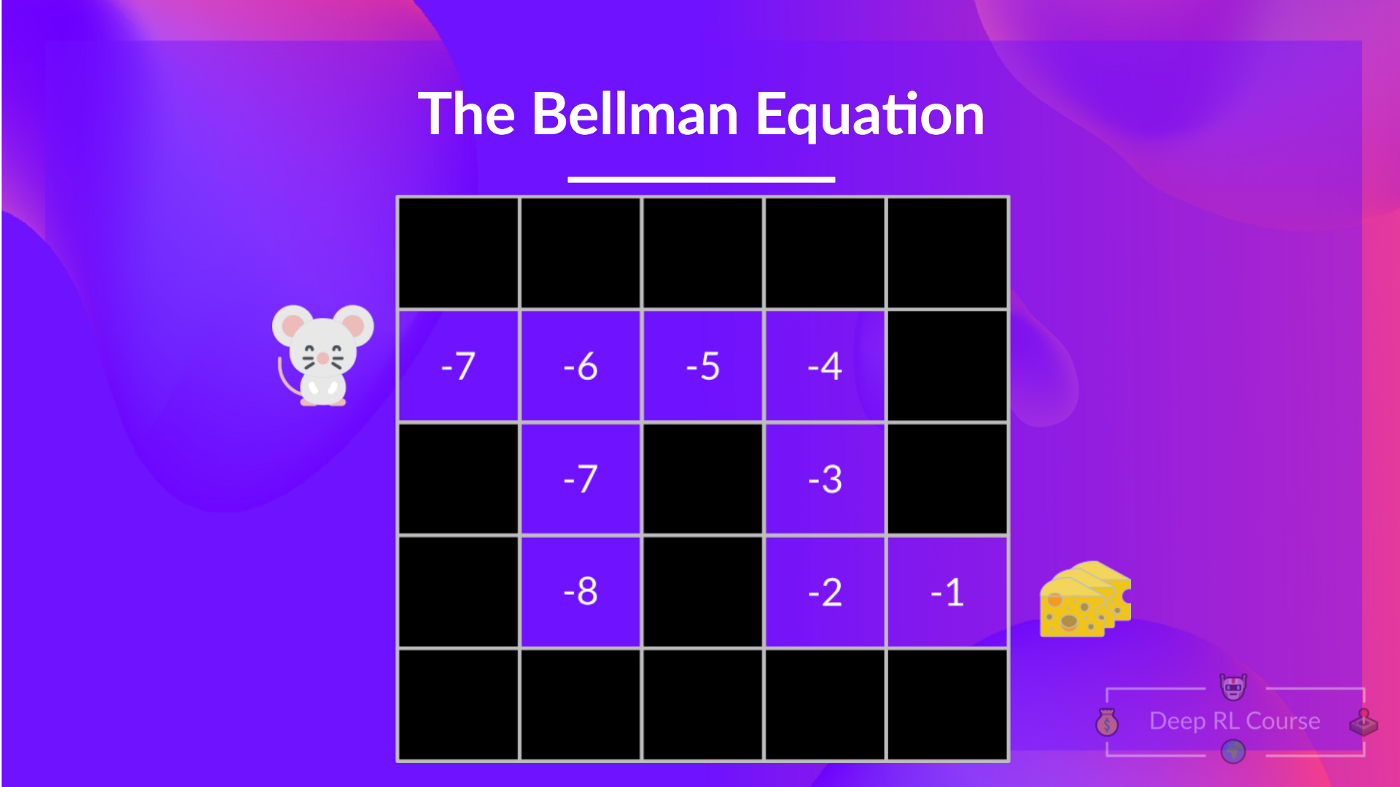
- 를 계산하려면 주어진 state, action으로 부터 시작해서 return값을 계산해야한다. (예제에서는 간단히 하기 위해서 Greedy Plolicy, No discount 로 value를 계산하였다.)
- 를 한 번 계산해보면 아래와 같이 expected return을 모두 더해야한다.

- 다음으로 을 계산하면 아래와 같다.

- 위와 같이 매 state마다 이러한 return값을 계산하는 것은 그리 효율적이지 않고 지루하다.
- 따라서 이렇게 모든 state, state-action pair에 댛여 expected return을 계산하기 보다는
Bellman Equation을 사용할 수 있다.
Bellman Equation은 매 step부터 모든 값을 계산해 나가는 대신 아래와 같이 표현하는 recursive equation이다.
- 따라서 처음에 구하였던 state 을 아래와 같이 단순화하여 계산할 수 있다.

Monte Carlo & Temporal Difference Learning
- Q-Learning을 배우기 앞서 우리가 살펴볼 마지막 내용은 두 개의 learning strategies이다.
- RL agent는 environment와 상호작용하며 학습한다. 경험(experience)과 reward가 주어졌을 때 agent가 이를 통해 value function과 policy를 update한다.
- Monte Carlo와 Temporal Difference(이하 TD)는 어떻게 value function과 우리의 policy를 학습할까에 대한 strategies이다.
- 간단히 말해서 Monte Carlo는 학습 시 모든 episode를 사용한다. 반면 TD는 딱 한 step, 만을 사용하여 학습한다.
Monte Carlo
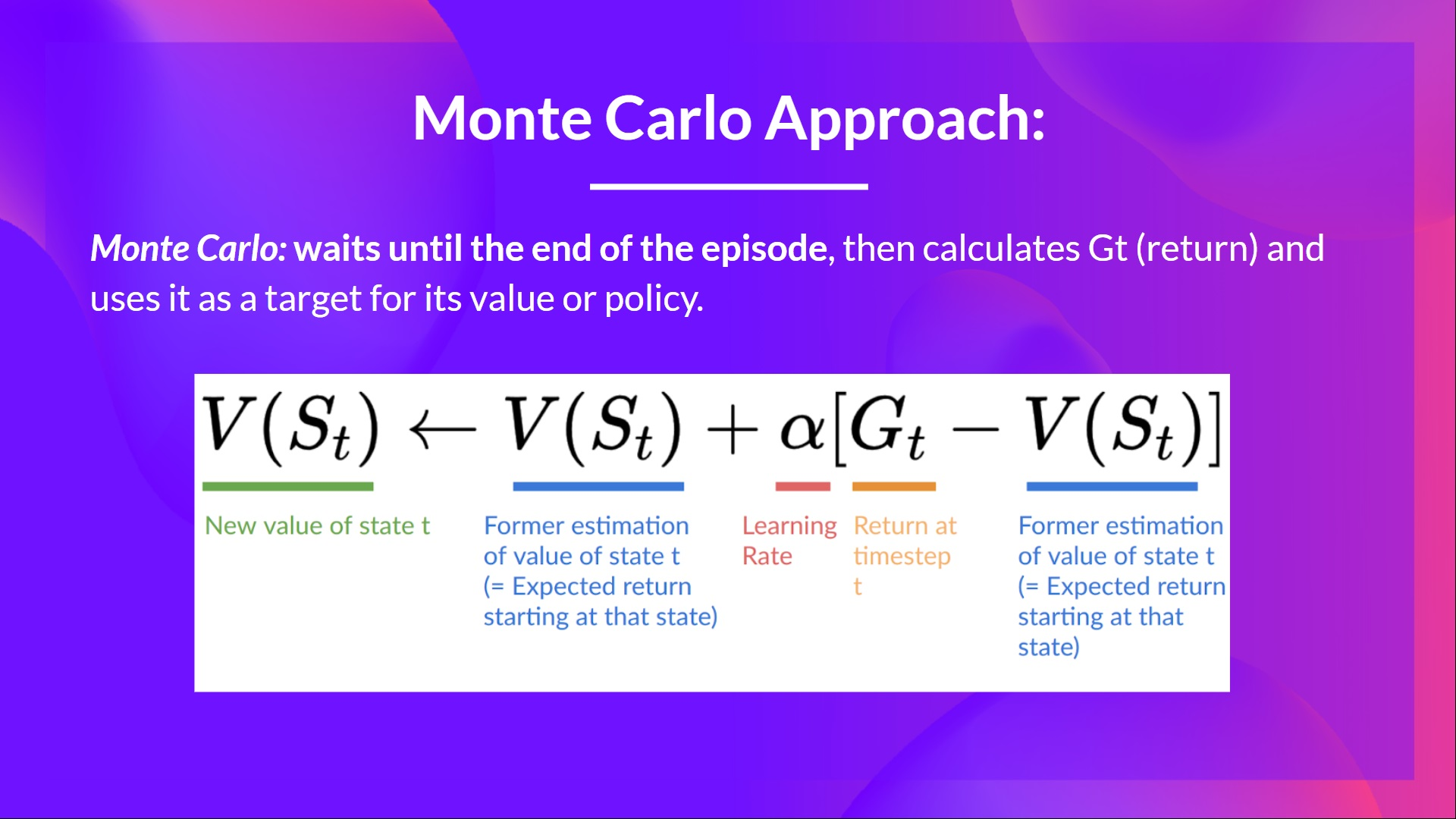
Monte Carlo는 episode가 끝날 때까지 기다리고 return 를 계산한다. 그리고 이를 를 update하는 target으로 사용한다. 따라서 Monte Carlo 방식은 value function을 update하기 전에 모든 episode가 종료되어야한다.
- Example

- 항상 같은 포인트에서 episode를 시작한다.
- 주어진 policy대로 agent를 actions을 취한다.
- reward와 next state를 얻는다.
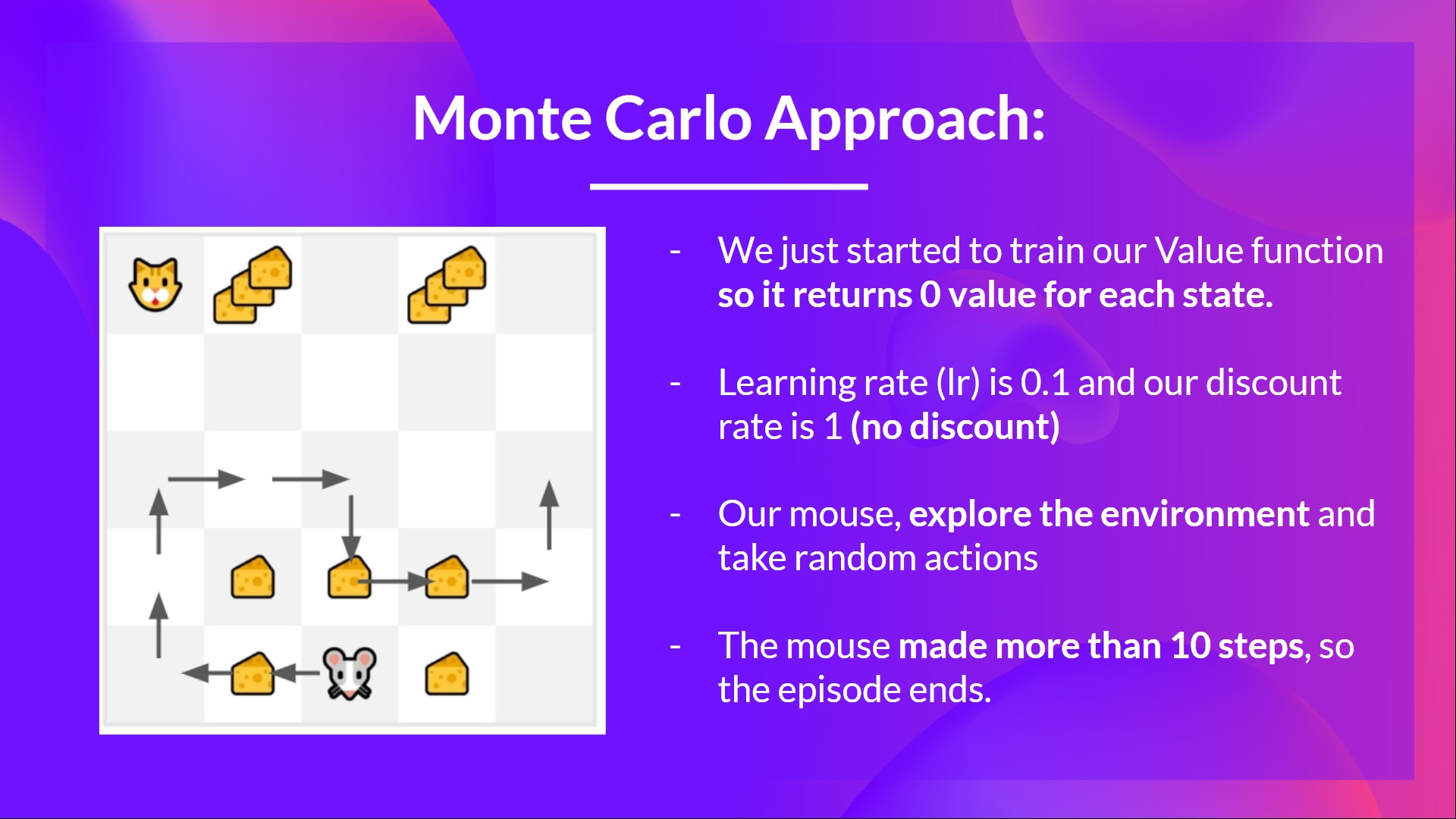
- 쥐가 고양이에게 잡아 먹히거나 쥐가 10step 넘어서 이동하면 episode를 종료한다.
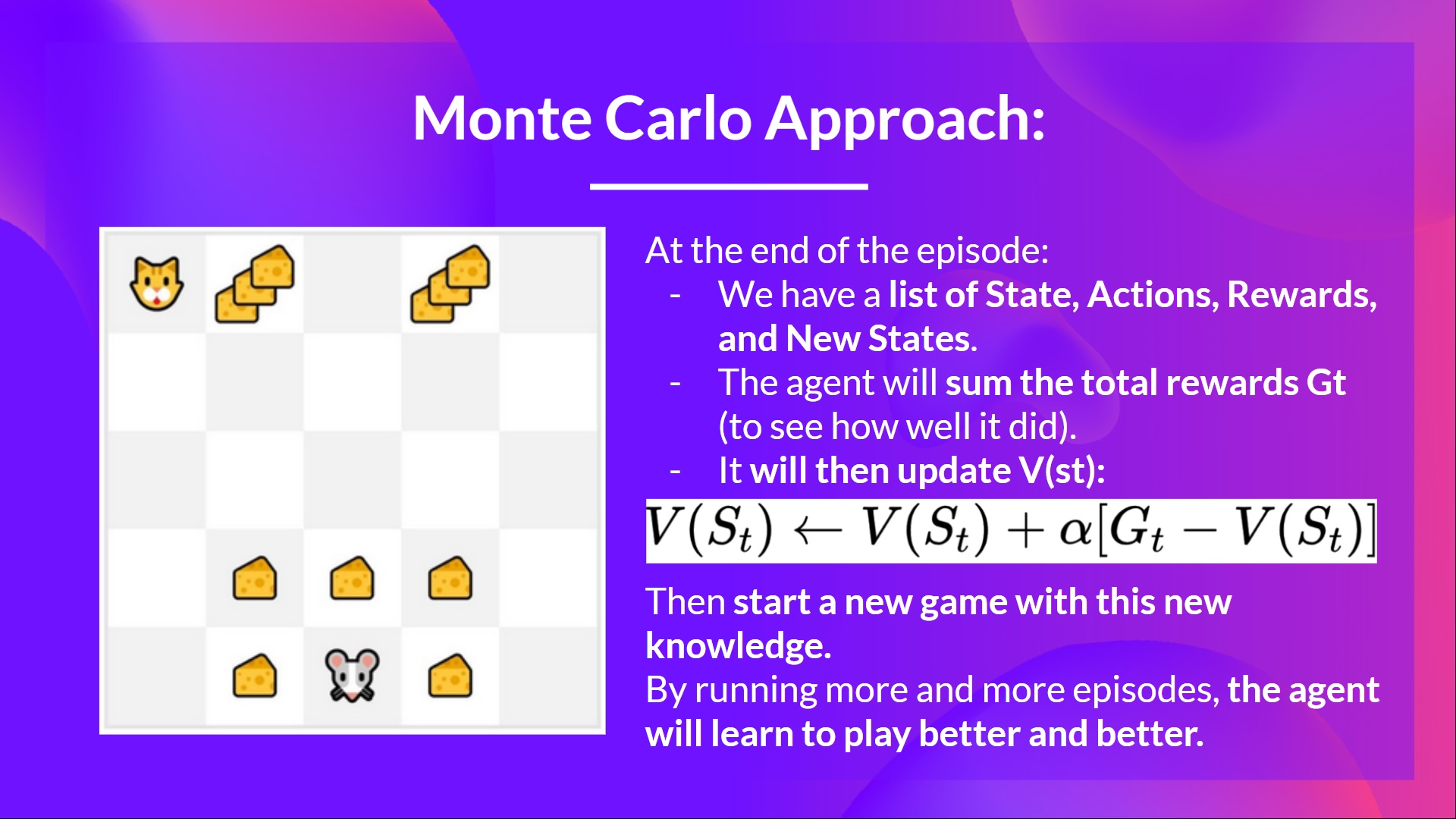
- episode의 끝에 State, Actions, Rewards, Next States tuples의 list가 얻어진다.
- Agent가 모든 rewards 를 더하여 계산한다.
- 아래와 같은 식으로 를 update한다.

- 위와 같이 update된 Value function으로 새로운 게임을 시작한다.
- episode를 거듭하며 거듭할 수록 agent는 더욱 더 잘 플레이 하게된다.
- 예를 들어, 만약 state-value function을 Monte Carlo Method를 이용해 학습한다면,
- 먼저 매 step마다 0 값을 return 하도록 value function을 initialize 한다.
- learning rate (lr) 은 0.1로 설정하고 discount rate 은 1(No Discount)로 설정한다.
- 우리의 쥐가 environment를 탐험하며 random action을 취한다.

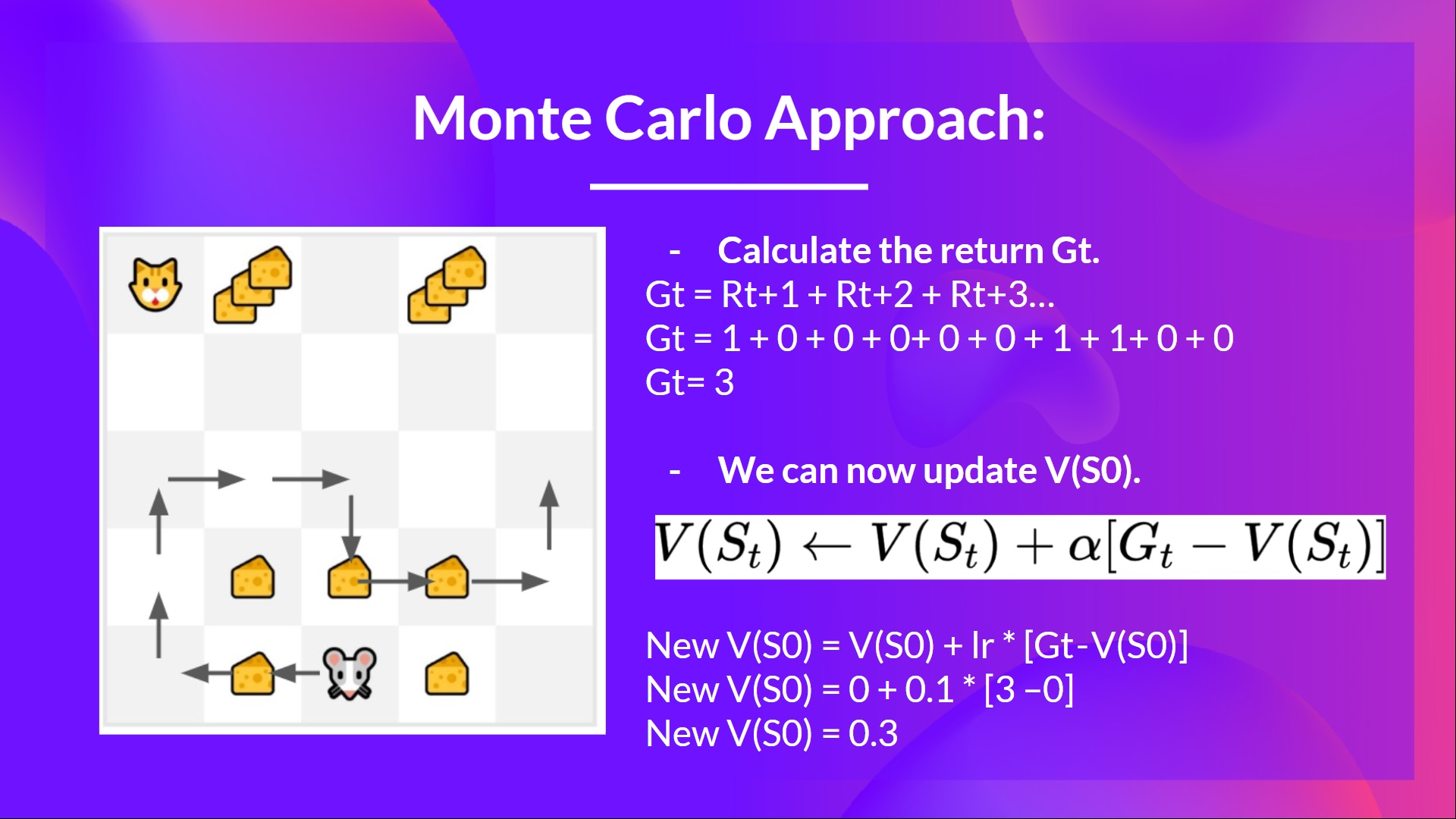
- 우리는 이때 State, Actions, Rewards, Next States를 얻고 이를 통해 return 를 계산해야한다.
- 이제 를 update 할 수 있다.
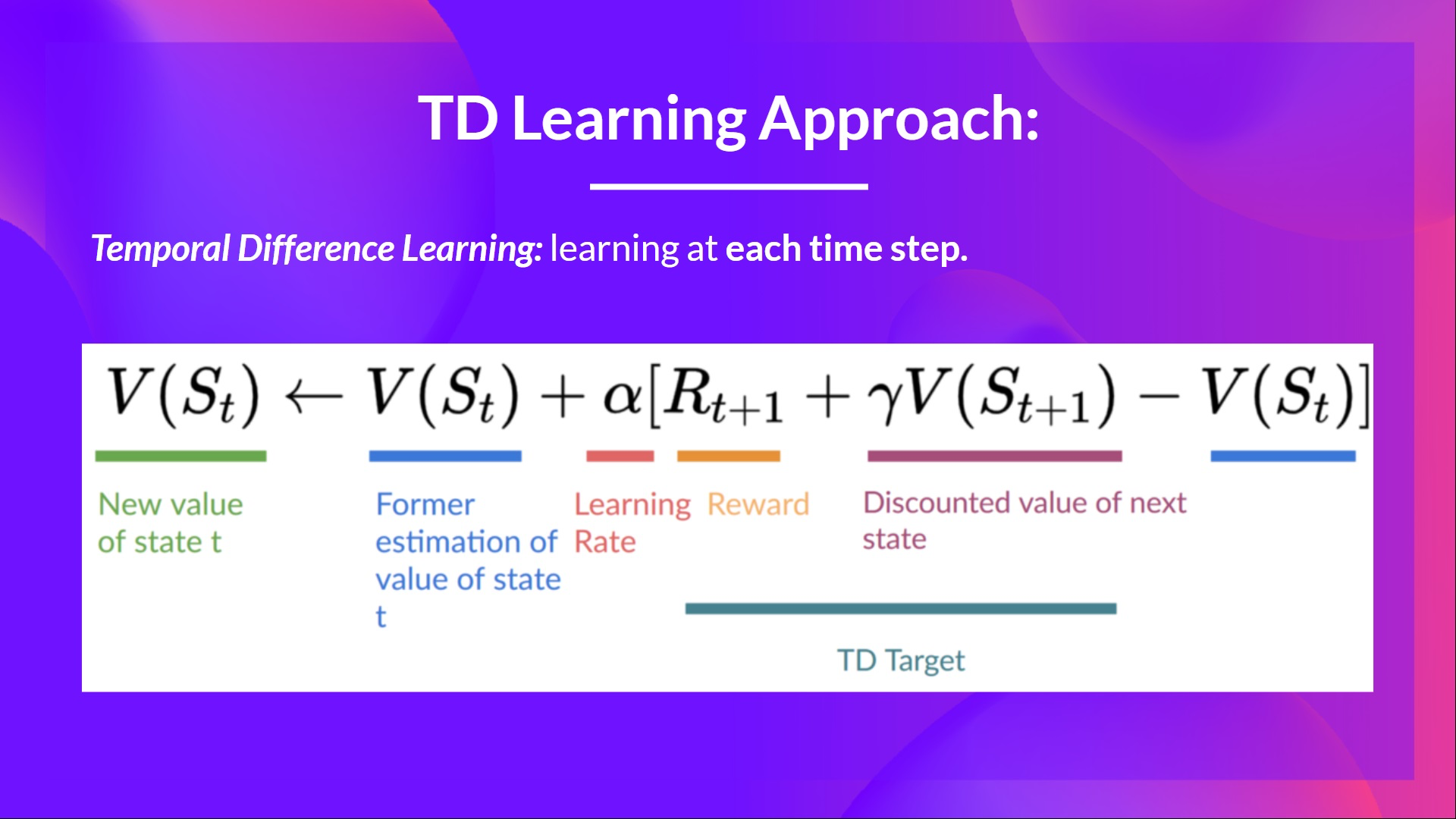
Temporal Difference Learning: learning at each step
- TD는 한편, TD target을 구성하고, 을 사용하여 를 update 하기 위해 딱
one iteration (one step),만을 필요로한다.
- TD의 아이디어는 매 step마다 를 update하는 것이다.
- 하지만 모든 episode를 거친 것이 아니기 때문에 가 없다. 대신 와 을 더하여 를 예측한다.
이를
bootstraping이라고 한다. 이는 TD의 update의 일부를 온전한 sample 가 아닌 기존의 의 추정치에 기반하기 때문이다.
- 이와 같은 방법을
TD(0),one-step TD(매 스텝마다 value function을 update한다.) 이라고 한다.
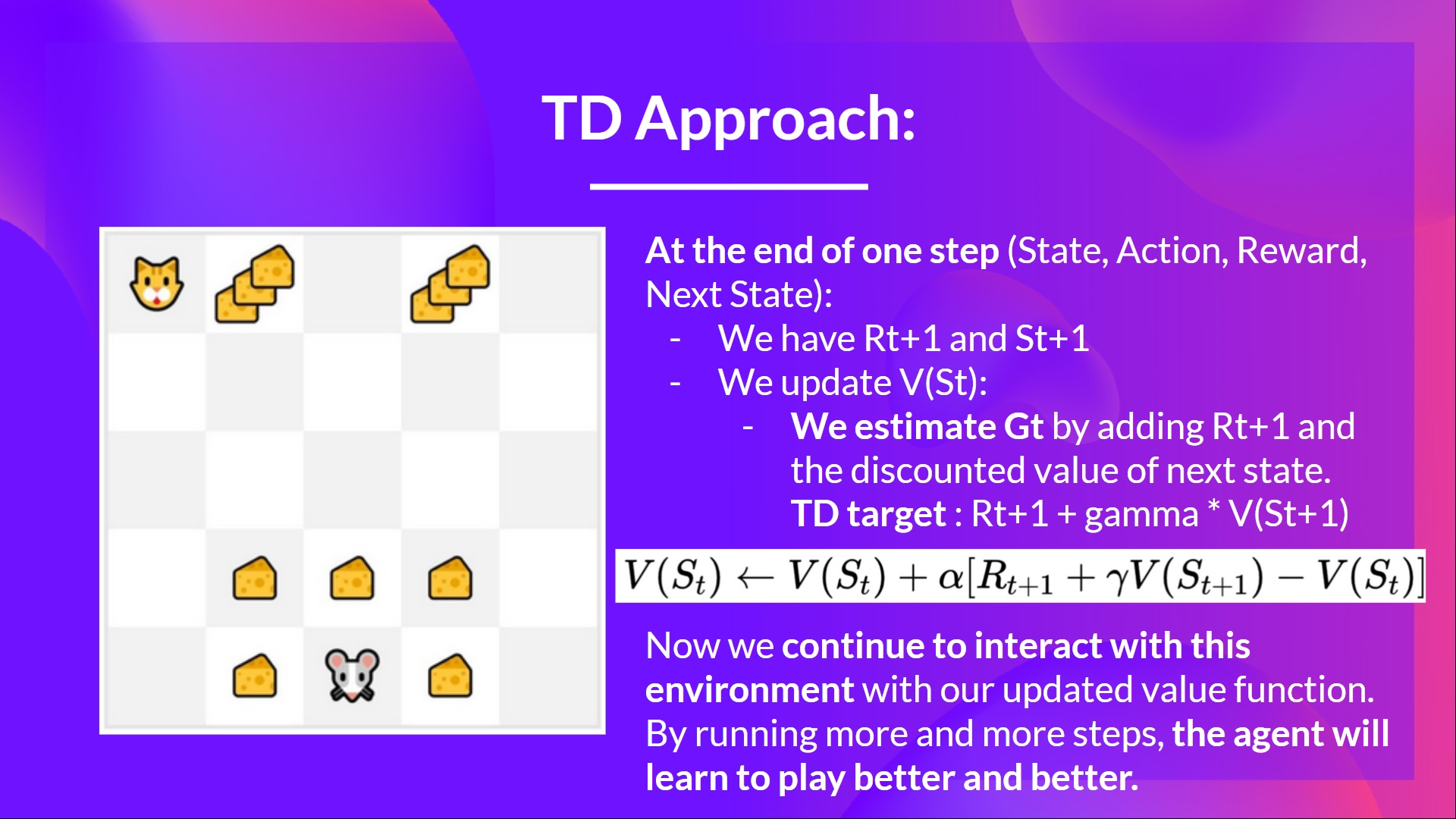
- Monte Carlo Method에서 사용했던 example을 다시 사용한다면,
- 모든 state 에서 0 값을 return 하도록 value-function을 initialize한다.
- learning rate lr은 0.1, discount rate 은 1로 설정한다. (No Discount)
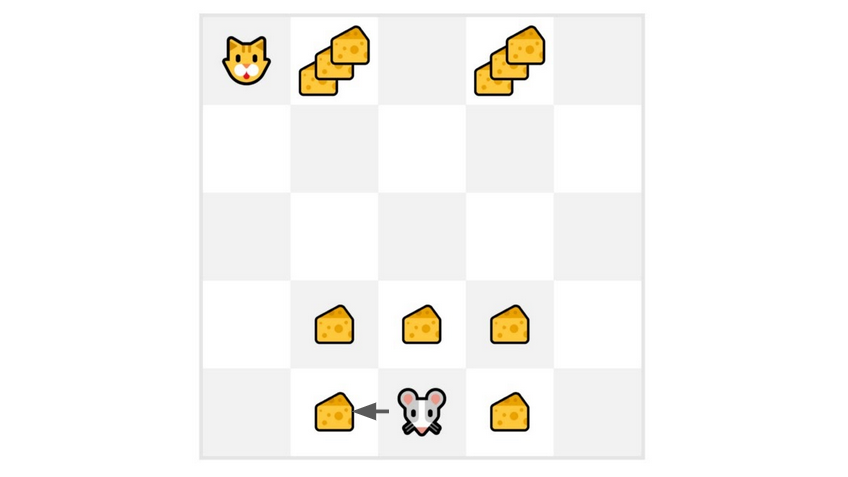
- 우리의 생쥐는 environment를 탐험하기 시작한다. 그리고 random action을 취한다. (여기선 왼쪽으로 이동한다.)
- 그러면 을 얻는다. (왼쪽으로 이동하면 치즈를 하나 먹을 수 있음.)
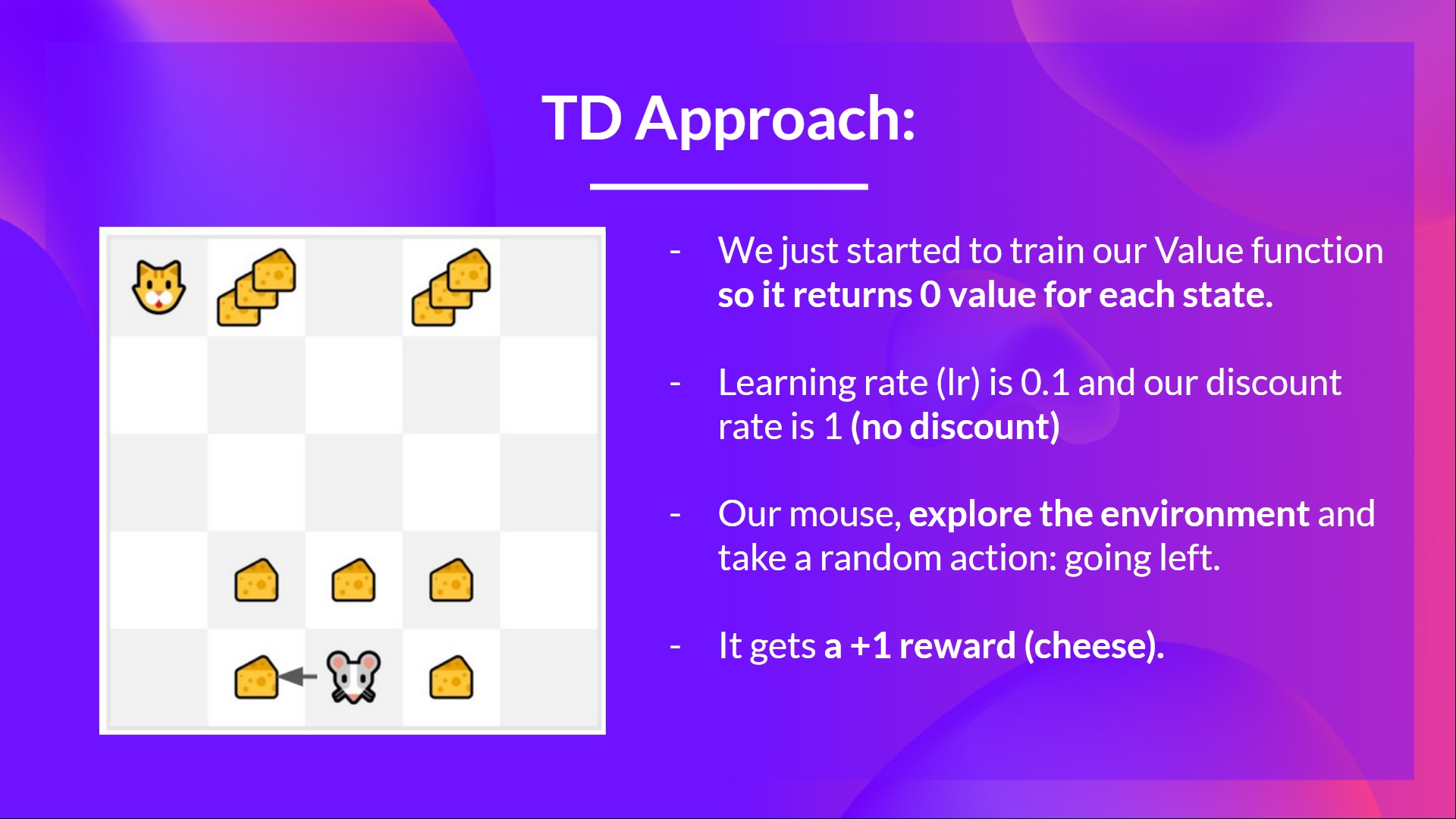
- 위와 같은 방법으로 생쥐가 모험을 더 해나갈 수록 value function이 update 된다.
Summary
Monte Carlo Method:- value function을 complete episode로 update한다. 따라서 정확한 return 값으로 update할 수 있다.
Temporal Difference: 한 step 으로부터 value function을 update 한다.TD target이라고 불리는 estimated return을 대신 사용하여 를 대신한다.
Intruducing Q-Learning
1. What is Q-Learning?
Q-Learning이란 TD approach를 사용하여 Action-Value function을 학습하는off-policyvalue-based method 이다.- off-policy: 추후 설명 예정
Value-Based Method: 주어진 state, state-action pair에서의 value를 나타내는 함수인 state-value, action-value function을 학습하여 optimal policy를 간접적으로 찾는 방법
TD Approach: 주어진 state, state-action pair 부터 시작하여 episode의 끝까지 진행 후 학습 하는 것이 아닌 각 step을 진행하여 value function을 update
- Q-Learning은 Q-function과 주어진 state의 value와 취해야 할 action을 정하는 action-value function을 학습하기 위해 사용하는 알고리즘이다.
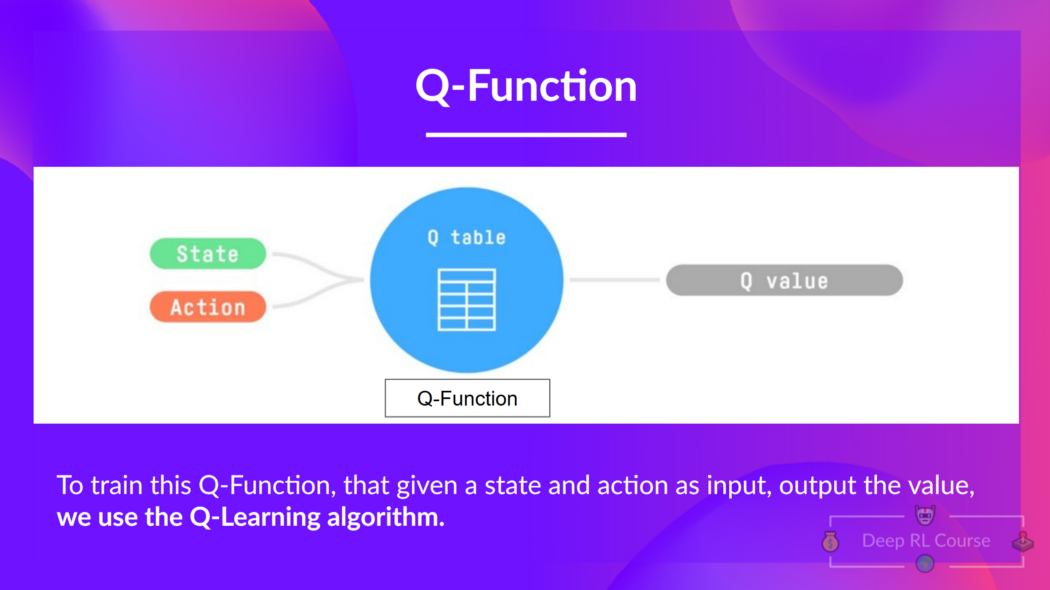
state, action이 주어졌을 떄, Q function은 state-action value (Q-Value 라고도 불림)을 output으로 갖는다.
Q는Quality에서 온 것.
- 내부적으로 Q-function은
Q-table이라는 것으로 encode 된다. Q-table 에는 각 cell 마다 state-action pair value가 대응된다. Q-table 을 Q-function을 memory, cheat-sheet 으로 봐도 좋다.
- Example

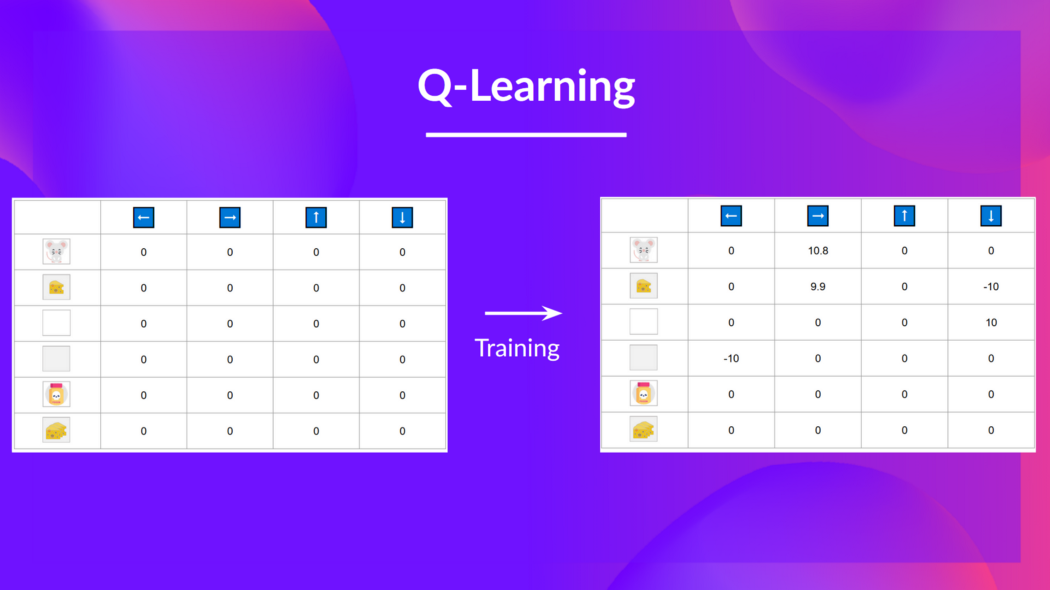
- Q-table은 initialize된 상태이다. 모든 values 가 0인 이유고, 이 table 은 각 state, action에 대응되는 state-action values 를 포함한다.

- 초기 상태에서 위로 이동하는 것에 대한 state-action value 값이 0인 것을 확인 할 수 있다.

- 따라서 Q-function은 각 state-action pair의 value를 갖고 있는 Q-table을 사용한다. state-action 이 주어졌을 때 Q-function은 최종 value를 구하기 위해 Q-table 의 내부를 탐색한다.

- Q-Learning 의 알고리즘을 나타내면 아래와 같다.
- Q-Function을 학습한다. 이는 내부적으로 Q-table과 동일하며 state-action pair values를 포함한다.
- state, action이 주어지면 Q-function은 대응되는 value를 찾기위해 Q-table을 탐색한다.
- 학습이 종료되면, 우리는 optimal한 Q-function, 즉 optimal한 Q-table을 갖고 있다.
- 만약 이 Q-function이 정말 optimal하다면, 각 state마다 어떤 action을 취하는 것이 best인지 알기 때문에 optimal 한 policy를 찾았다고 할 수있다

- Q-function은 학습 초기에는 주어진 state, action에 대하여 임의의 values 값을 return할테지만 학습을 거듭하며 optimal policy에 점점 근사해질 것이다.
Q-Learning Algorithm
- 아래 이미지는 Q-Learning 의 pseudocode 이다.

Step 1: Q-table을 initialize 한다.
각 state-action pair에 대하여 values를 초기화한다. 대부분의 경우 0들로 초기화한다.
Step 2: Choose an action using theepsilon-greedy strategy
The epsilon-greedy strategy는 exploration/exploitation의 trade-off를 핸들링하는 policy이다.
Epsilon-Greedy Strategy으로 초기화 한다.
의 확률로, exploitation 한다. (agent가 가장 높은 state-action value를 갖는 action을 취한다.)
의 확률로, exploration 한다. (agent가 random action을 취한다.)
- 학습 단계 초기에는 이 매우 높기 때문에 대부분의 경우 exploration을 한다. 하지만 학습이 진행되고 우리의 Q-table이 더욱 더 좋은 estimation을 냄에 따라 점점 값을 줄여나간다. 왜냐하면 exploration 보다는 exploitation을 하기를 원하기 때문이다.

Step 3: action 를 수행하고, reward 와 next state 를 얻는다.
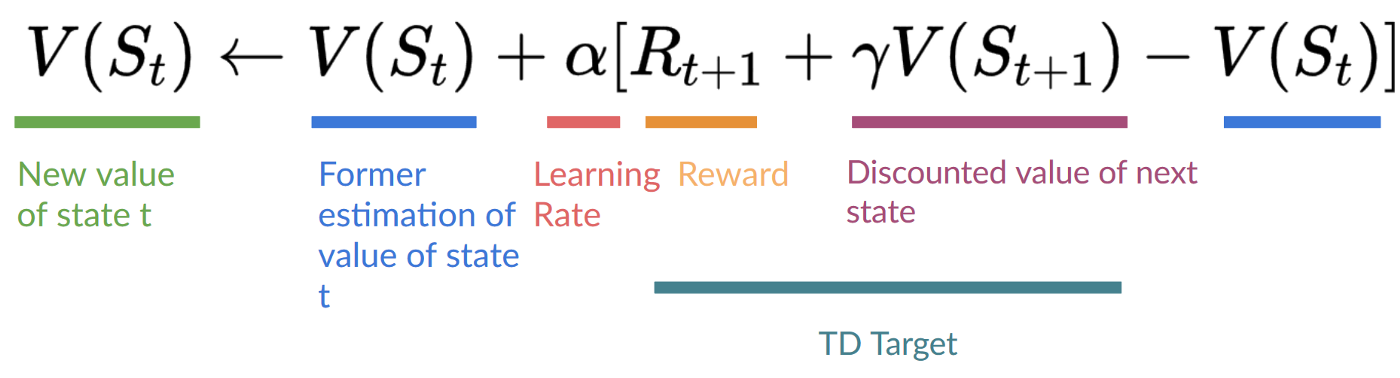
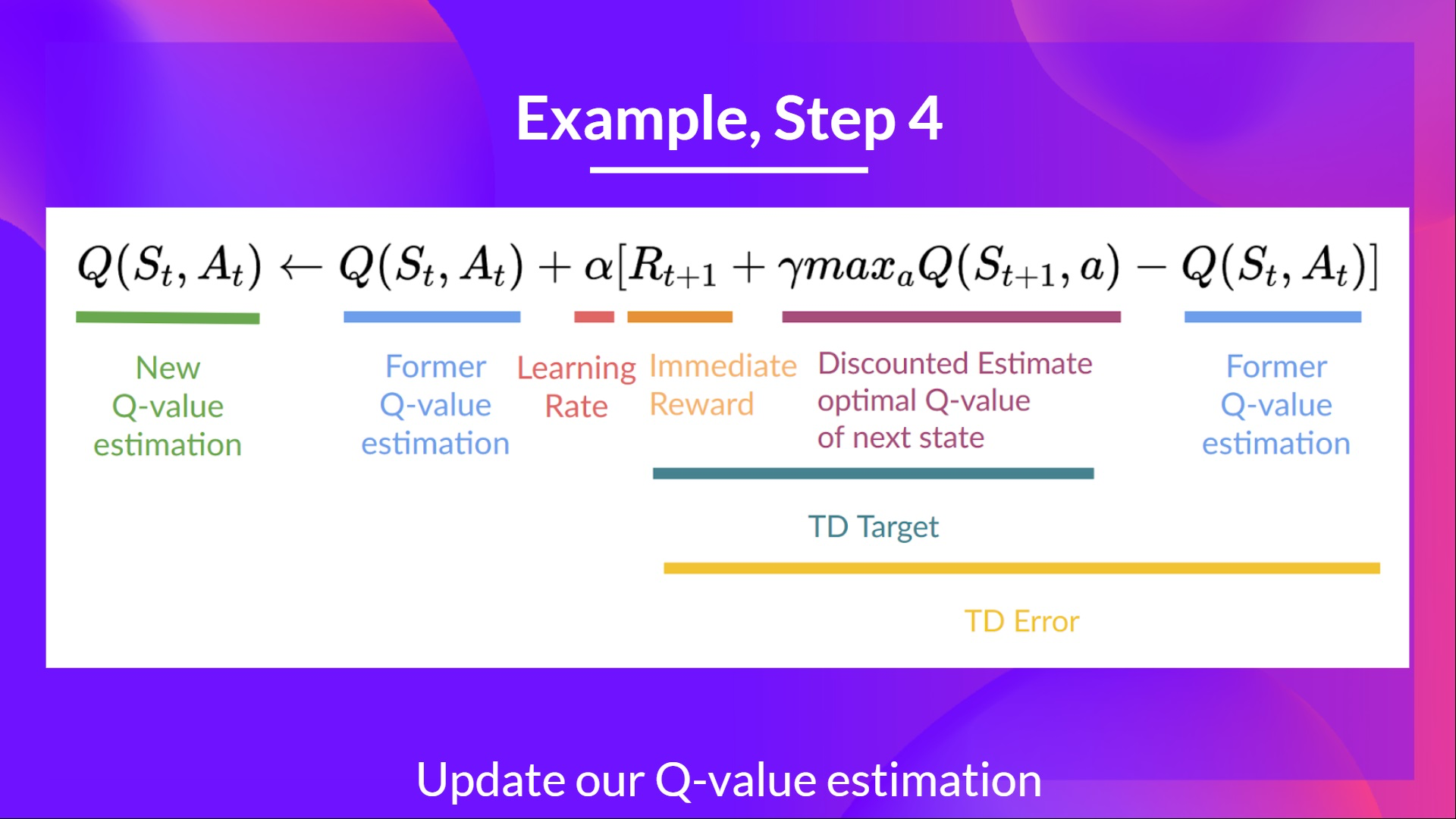
Step 4: 를 update 한다.- TD learning에서는 value function 혹은 policy를 update 하기 위해 one step of interaction 뒤에 바로 한다는 것을 기억하기 바란다.
- TD Target 을 구하기 위해 immediate reward 와 discounted value of next state 를 더한 값을 사용한다.

따라서 update formula는 아래와 같이 정리될 수 있다.

- 그렇다면 TD Target 을 어떻게 구할 수 있을까?
- action을 취하고 reward 을 얻는다.
- next state에 대하여 best state-action pair value를 얻기 위해 우리는 이때만큼은 Greedy Policy를 사용한다. 이는 Epsilon-Greedy Policy가 아니며 가장 높은 state-action value를 갖는 action을 취한다.
- 위와 같은 방식으로 Q-Value를 update하고 새로운 state 에서는 Epsilon-Greedy Policy를 사용하여 다음 action을 결정한다.
Q-Learning이Off-Policy Algorithm이라고 불리우는 이유이다.
Off-Policy vs On-Policy
- 차이는 미묘함
Off-Policy: acting(inference), updating(training) 에 서로 다른 policy를 적용하는 것.- 예를 들어 Q-Learning 에서는 acting policy로는
Epsilon-Greedy Policy를, training policy로는Greedy-Policy를 쓴다.
- 예를 들어 Q-Learning 에서는 acting policy로는
On-Policy: acting, updating에 서로 같은 policy를 적용하는 것SARSA같은 또 다른 value-based algorithm은 acting, updating 에 모두 Epsilon-Greedy Policy를 사용한다.
Q-Learning Example
간단한 예제를 살펴보자

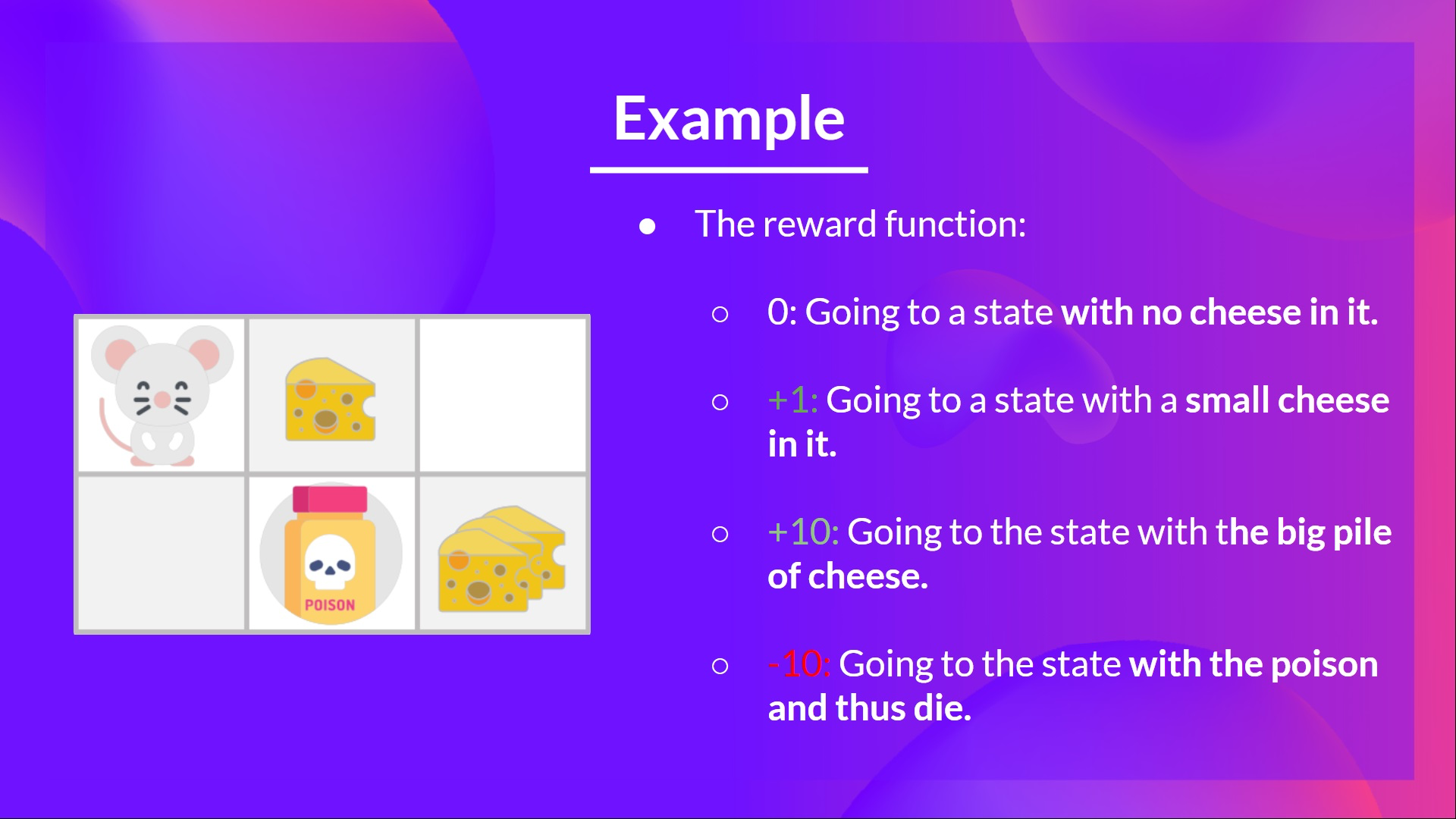
- 당신은 생쥐고 미로에 갖혀있다. 또 매번 같은 starting point 에서 시작한다.
- 목표는 우하단에 있는 치즈 더미를 먹는 것이다.
- episode의 end 조건은 5step 보다 더 이동하던가, poison을 먹던가 치즈 덩어리를 먹는 경우이다.
-
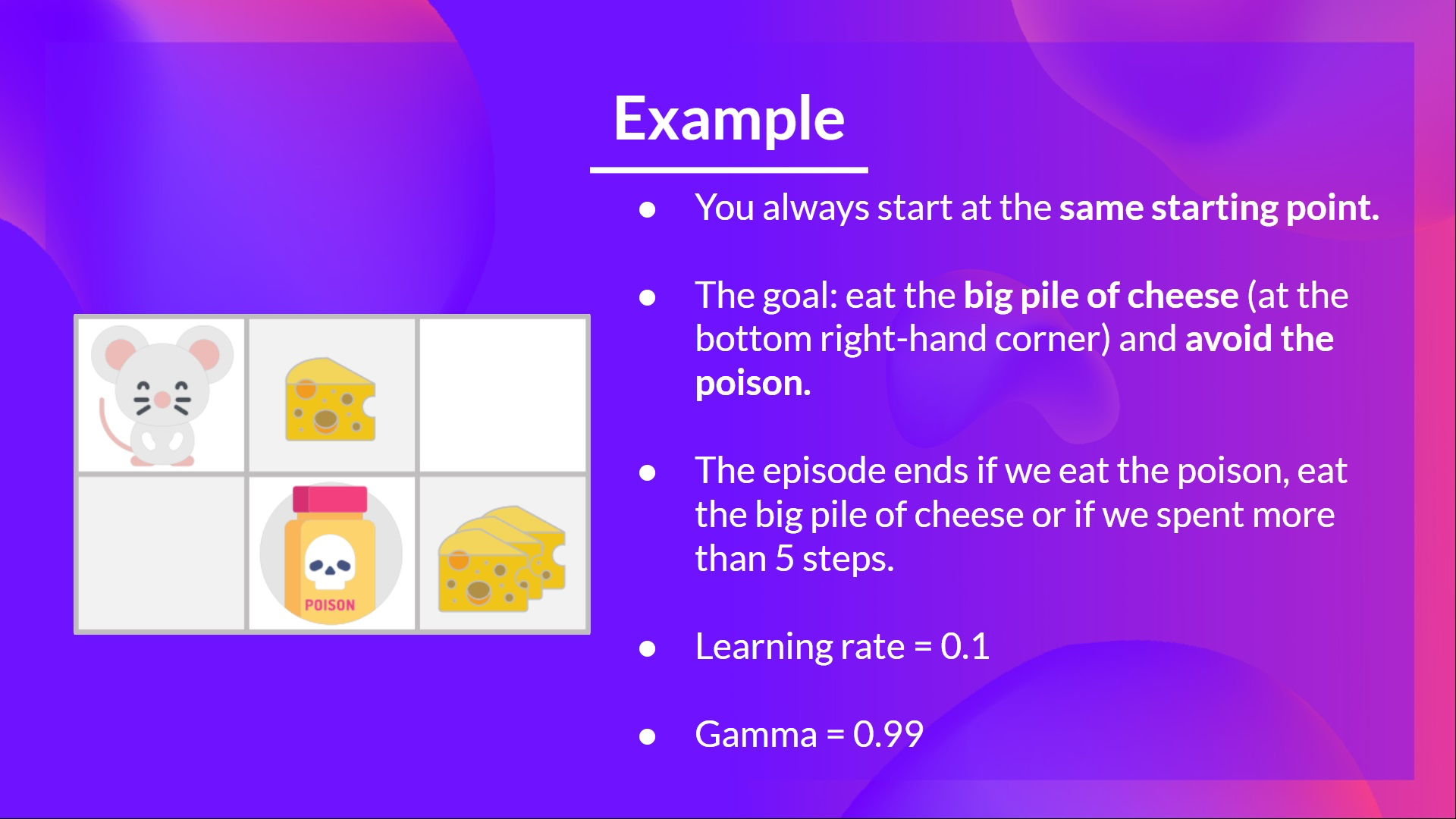
- reward는 아래와 같다.

- 위 RL problem을 해결하기 위해 Q-Learning Algorithm을 사용
Step 1: Q-table 초기화
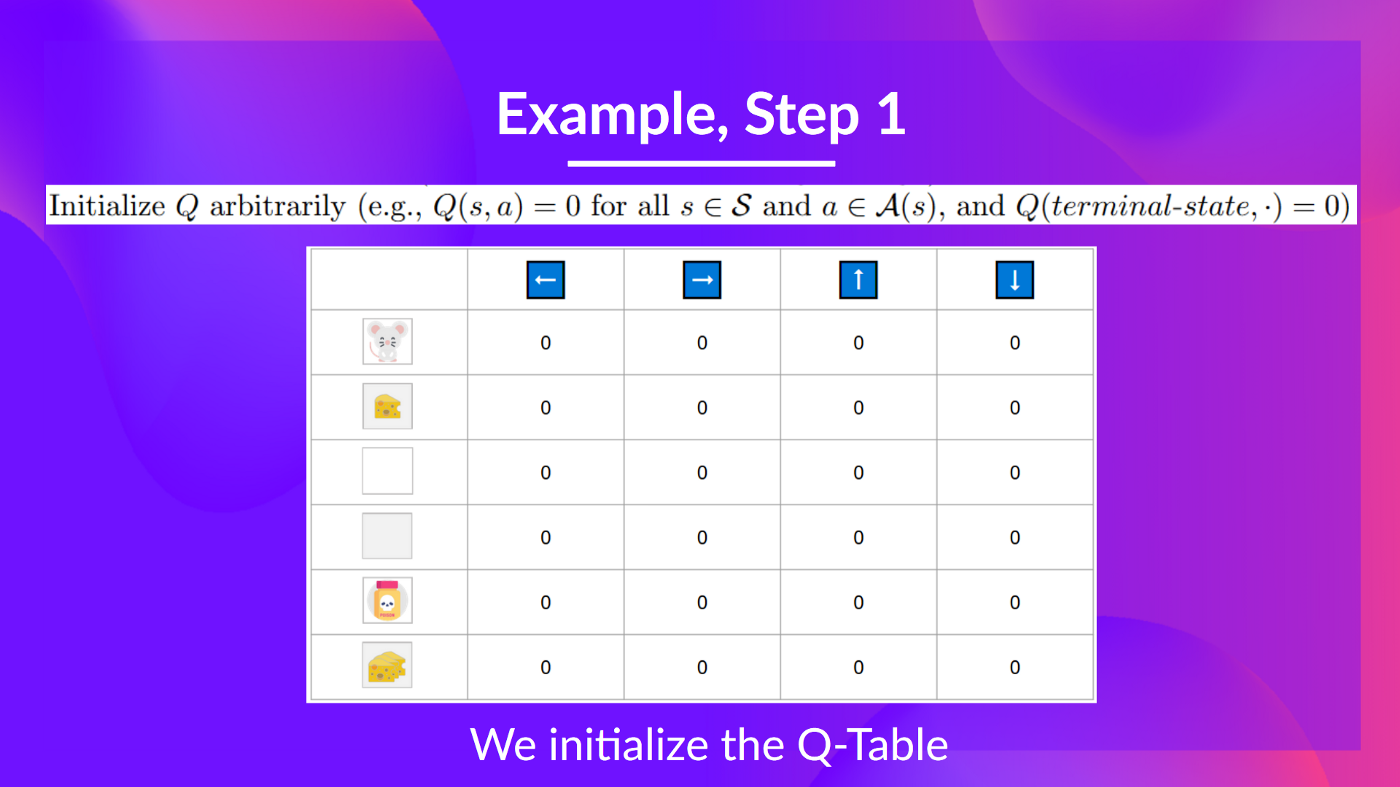
- 현재의 Q-table 은 쓸모가 없다. 이를 학습시켜보자
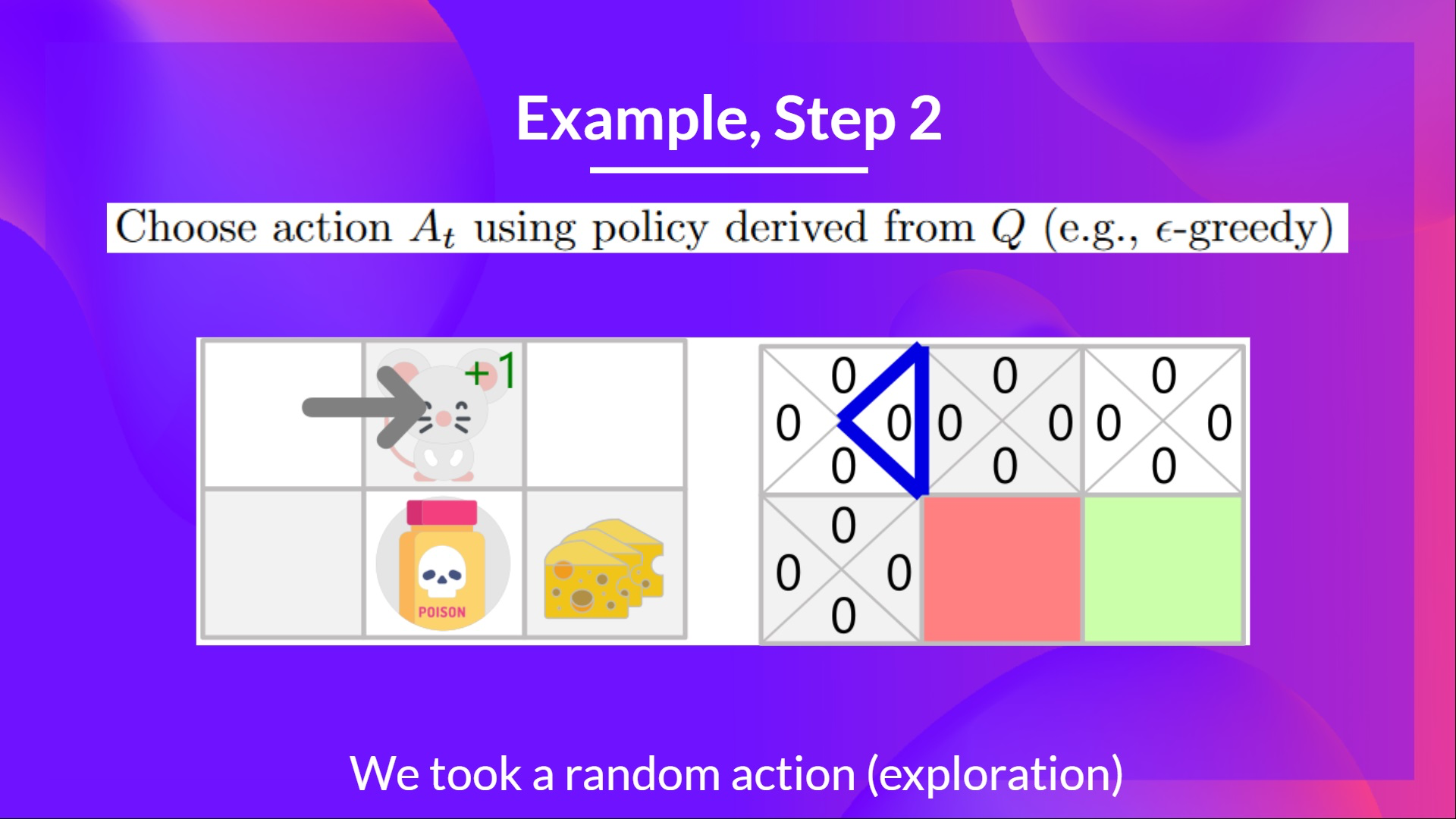
Step 2: Epsilon-Greedy Strategy를 사용하여 action을 선택
- 이기 때문에 여기서는 random action을 취한다. (본 예제에서는 오른쪽 선택)
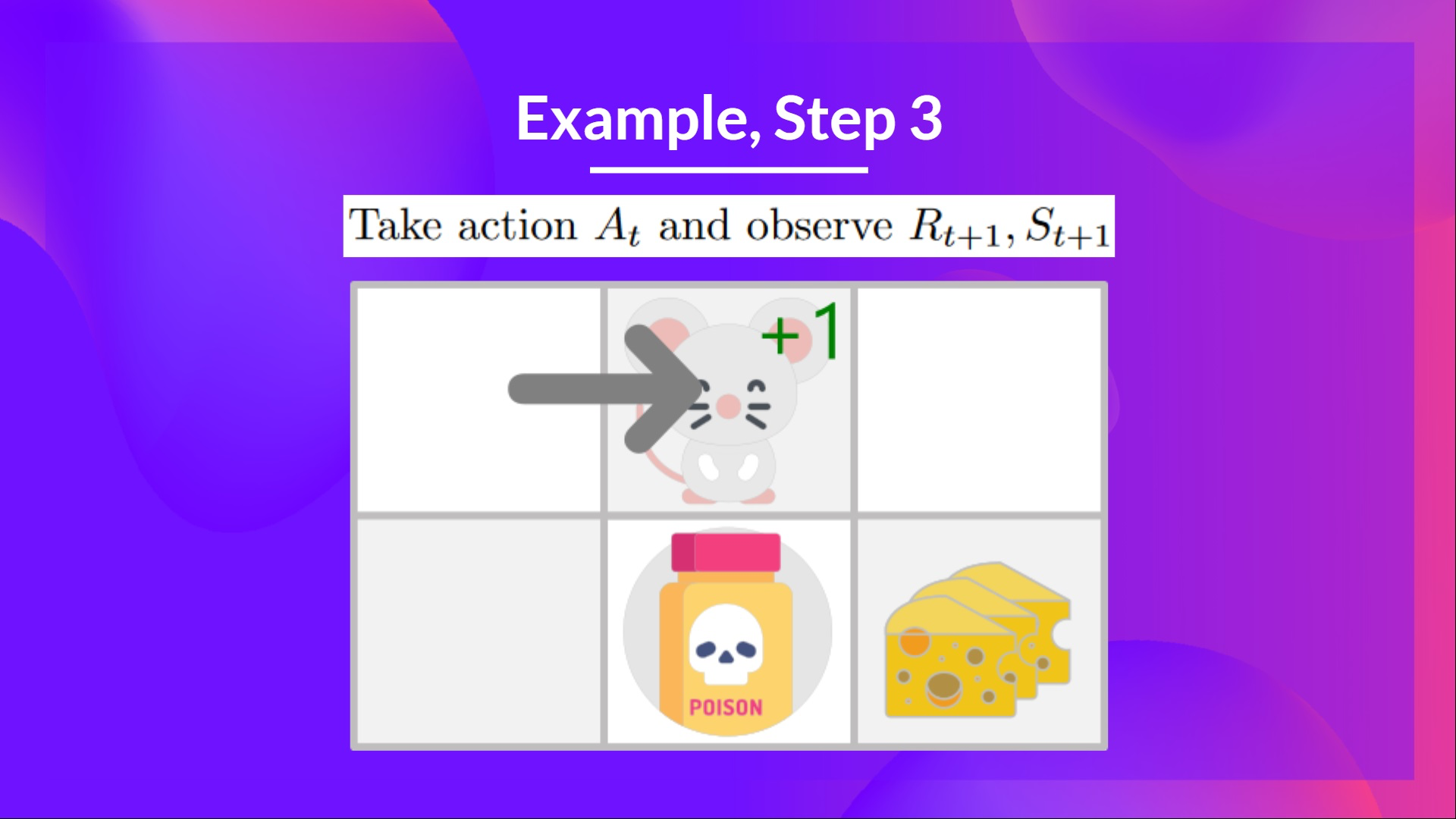
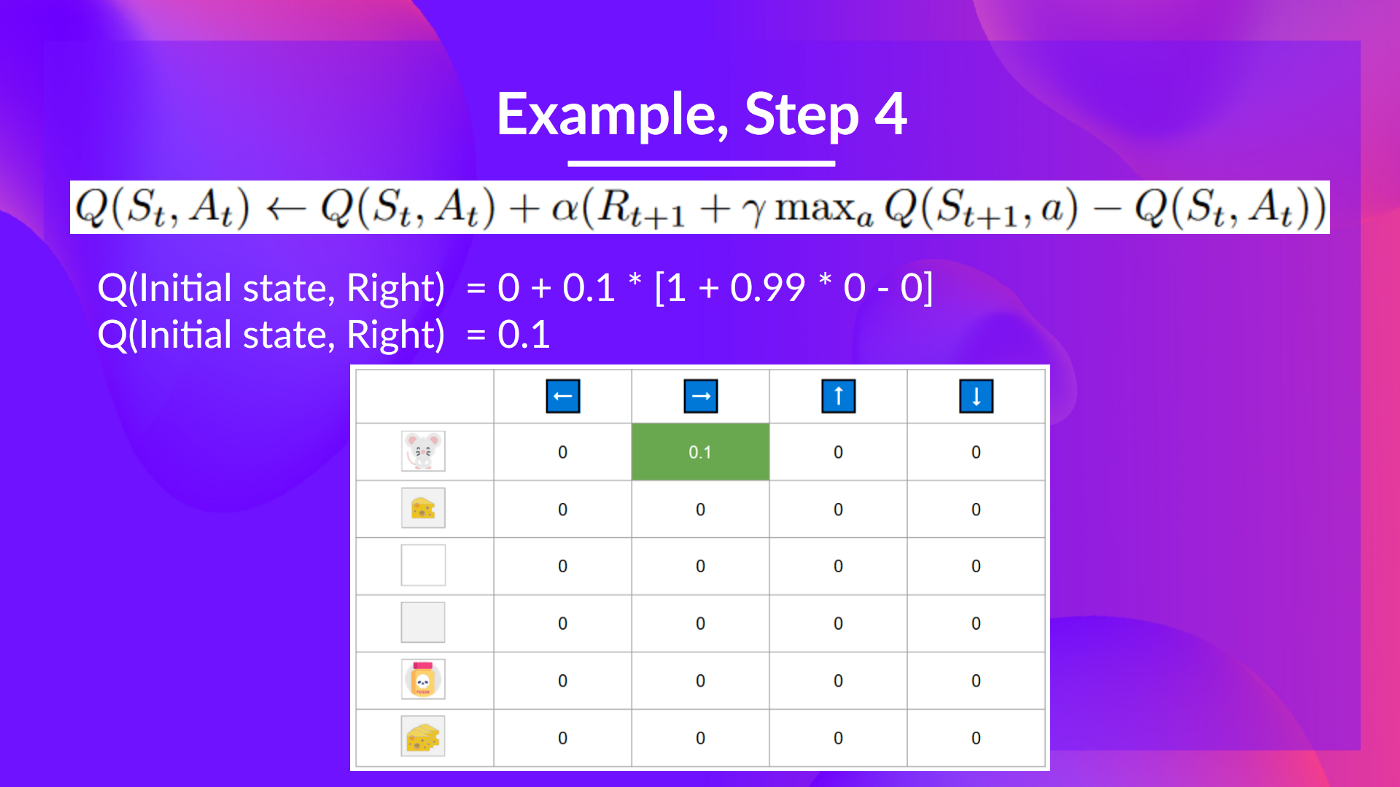
Step 3: action 를 수행하고, reward , Next State 를 얻음
- 오른쪽으로 이동했기 때문에 치즈 한덩이를 먹을 수 있었다. 따라서 과 next state를 얻는다.
Step 4: 를 update 한다.
두번째 Training Timestep 진행.
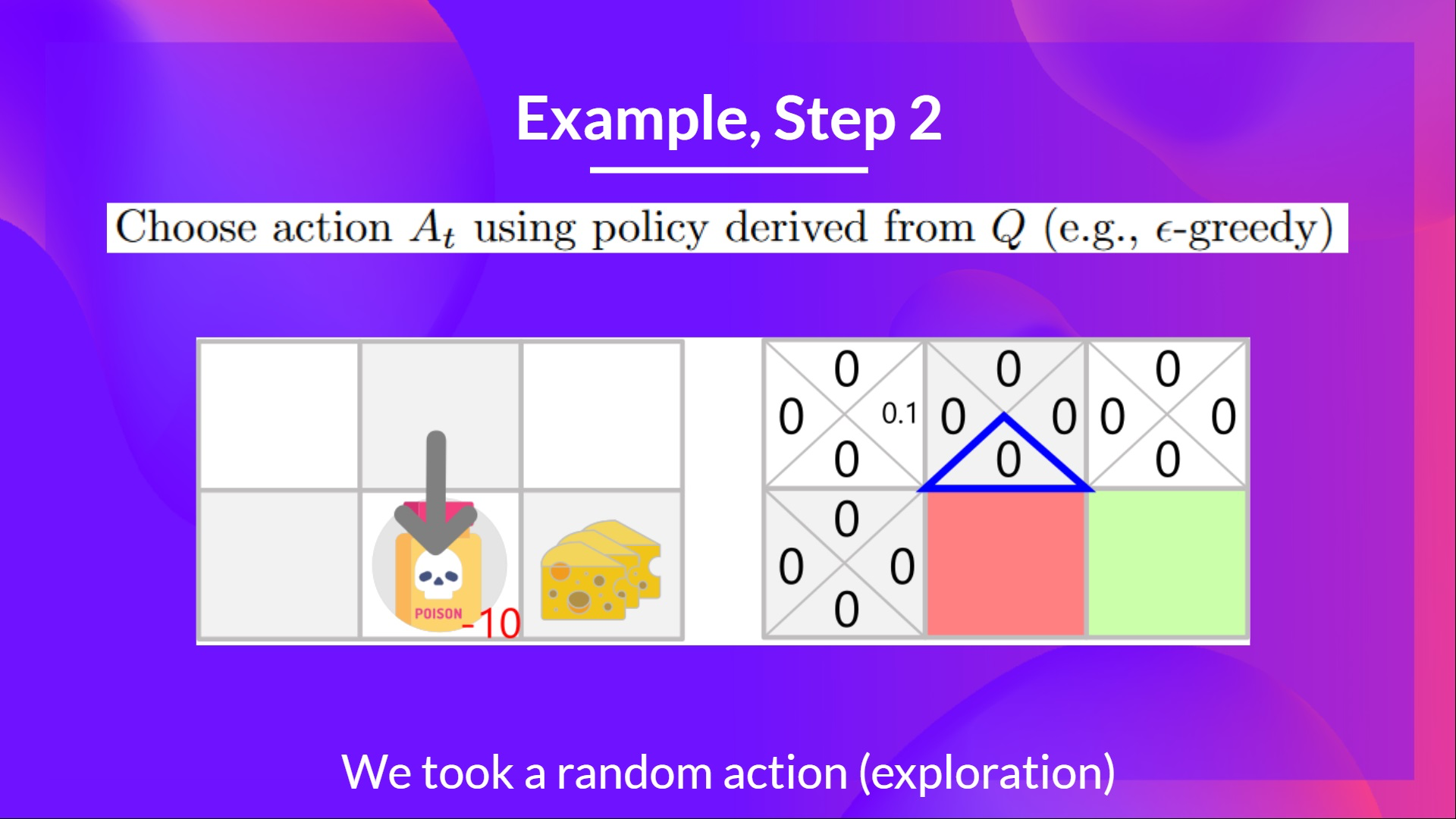
Step 2: Epsilon-Greedy Strategy를 사용하여 action을 선택
- 쯤으로 아직도 아주 높기 때문에 다시 한 번 random action을 취한다. 여기서는 아래로 이동했다고 생각하자.
Step 3: action 를 수행하고, reward , Next State 를 얻음
- poison을 먹었기 때문에 을 얻는다.
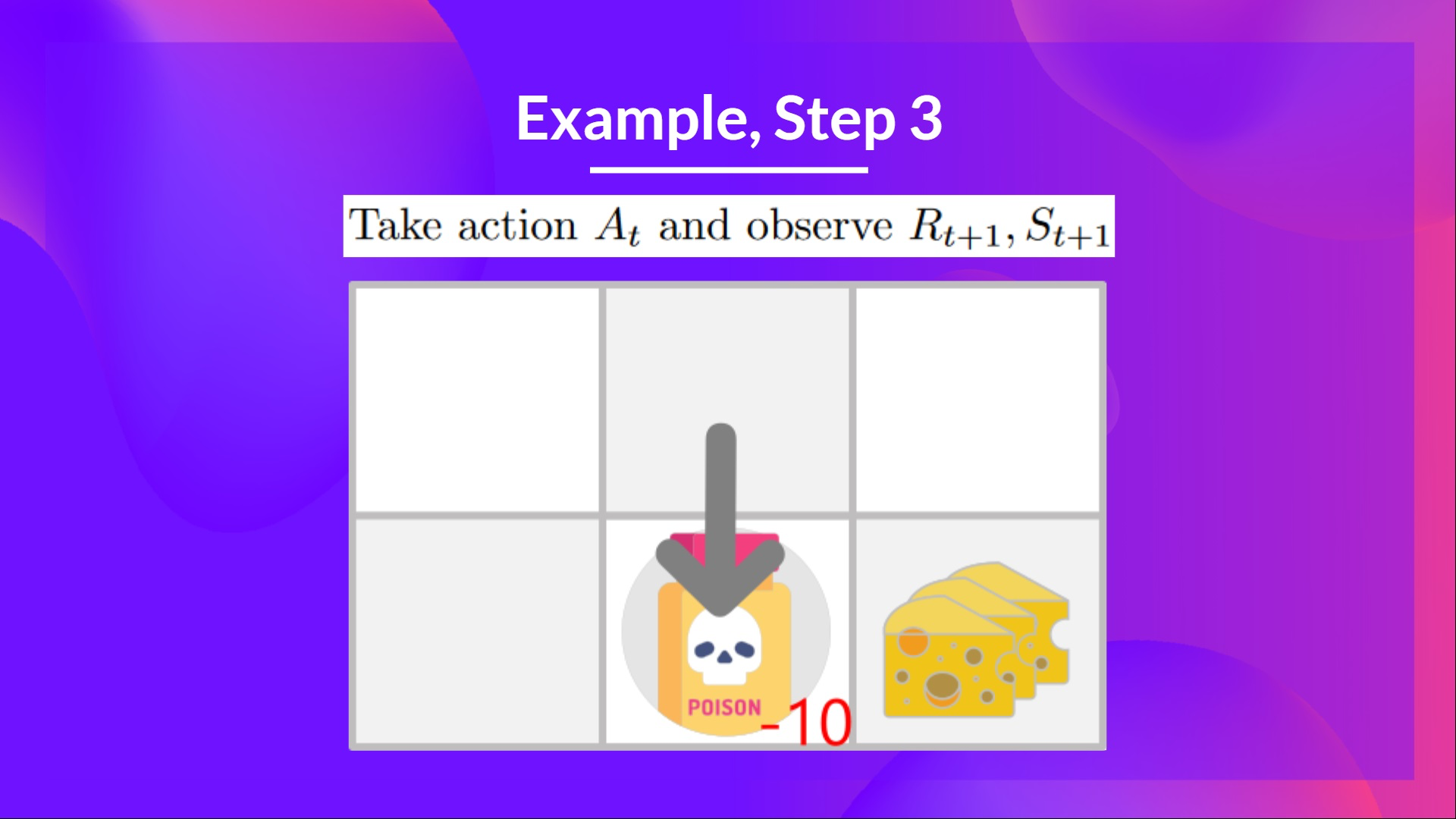
Step 4: 를 update 한다.
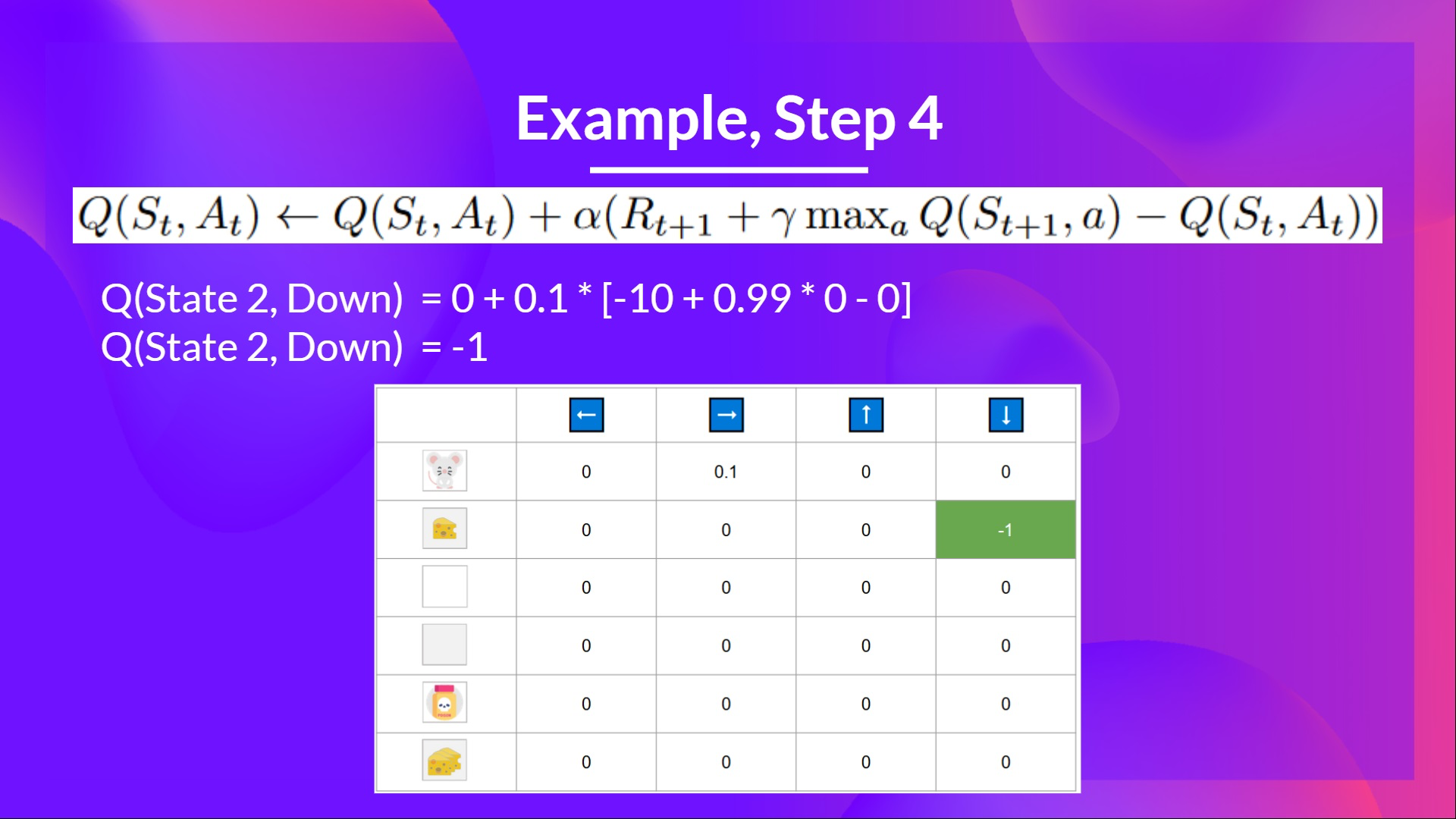
- 이렇게 episode가 종료된다. 이제 새로운 episode를 시작해야한다. 오직 2steps의 exploration이 있었지만 Q-table을 보면 우리의 agent 가 아주 조금은 똑똑해질 것이라는 것을 알 수 있다.
Uploaded by N2T